 English
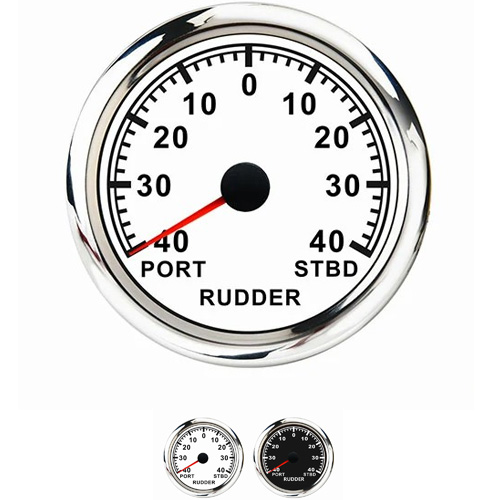
English rudder angle indicator images


Emergency steering: Move the steering switch handle for left or right steering training. At this point, the rudder angle indicator will display the actual rudder blade direction, the ship will turn in the corresponding direction, and the compass will display the actual heading of the ship. If the handle is stopped, the rudder angle indicator will stop at the corresponding angle. Follow up steering: The follow up steering system refers to the system that not only causes the rudder blades to rotate in the specified direction, but also specifies the steering angle of the rudder blades after the pilot issues the steering command. During training, rotate the servo steering wheel to a certain position, and the rudder angle indicator will synchronously indicate the angle corresponding to that position. At this point, the rudder will drive the rudder blades to rotate at a certain speed to the angle indicated by the rudder angle indicator, which will lag behind the rudder command. The ship turns in the corresponding direction, and the compass displays the actual heading of the ship. Automatic steering: This instrument only zeros the rudder angle indication to the compass setting under automatic steering.
Compared to trajectory autopilot, heading autopilot is a compromise method for achieving autonomous navigation control of surface ships and has been widely applied in engineering. It is mainly used to achieve heading maintenance control at cruising speed of surface ships, thereby reducing the workload of ship pilots in steering. Heading autopilot cannot achieve ship's track tracking control. Even if the ship's heading maintenance control is achieved, manual intervention is often required, which is far from the true meaning of ship autonomous navigation control measures.
The navigation control computer receives speed commands and discrete expected track point sequences through the network, receives ship position and attitude information sent by GPS and attitude measurement equipment through RS232 serial port, and performs heading control loop calculation and speed control loop calculation. It sends rudder angle commands and throttle commands to the heading and speed control board through PCI bus in a digital manner. The speed control board receives heading and throttle commands from the navigation control computer through the PCI bus, receives rudder angle information sent by the rudder angle sensor through the RS422 serial port, calculates and outputs throttle analog voltage and start command to the engine through the control bus, and sends rudder angle execution command to the rudder angle execution mechanism, which controls the direction of the rudder.

Get a Quote / Info