 English
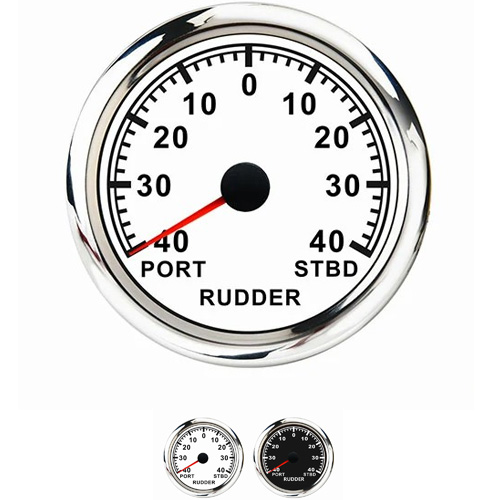
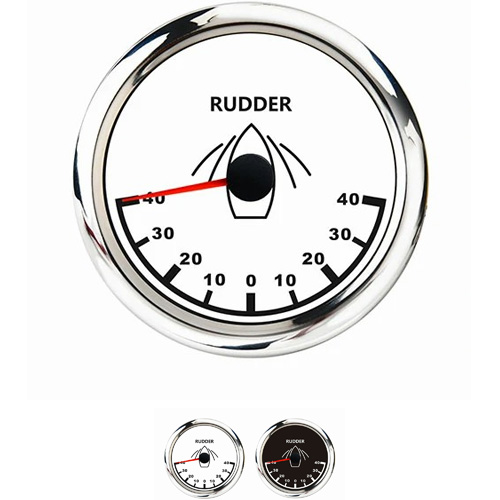
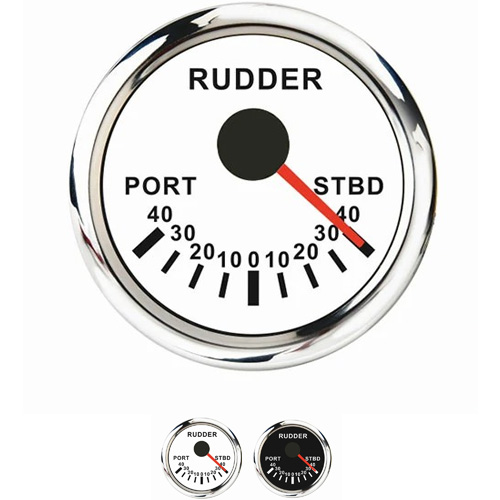
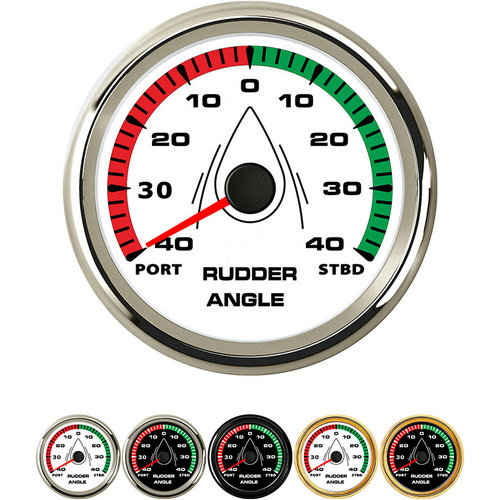
English rudder angle indicator and transmitters
The rudder angle indicator transmitter is a sensor that detects changes in rudder angle. According to the query of relevant information , as rudder angle is one of the important parameters for hydraulic rudder control of ship heading, the change of rudder angle directly affects the ship's heading direction . Therefore , in order to achieve precise control of rudder angle , it is necessary to use sensors to detect rudder angle changes and transmit the detected signals to the control system , in order to achieve precise control of hydraulic rudder.
For surface vessels sailing at sea or in inland rivers, it is often necessary to navigate autonomously according to preset flight paths to complete specific navigation tasks. For example, surface vessels need to navigate autonomously along the coastline, performing tasks such as terrain exploration , mine sweeping , water quality sampling , and visual monitoring . Another example is that a target ship needs to navigate autonomously along a designated trajectory , simulating water surface targets with motion characteristics , for the test missile to target . These types of tasks require ships to have unmanned autonomous navigation capabilities.
Track autopilot is a theoretical solution for tracking and controlling the trajectory of surface vessels , used to track and maintain the set route . This trajectory control scheme mainly includes trajectory deviation control and ship direction control . Heading control is used to control the ship's heading parallel to the expected track , while track deviation control gradually converges to zero on the basis of heading control , thereby controlling the actual track of the ship to converge to the expected track . This control scheme requires providing a continuous expected trajectory , but in practical engineering applications , planning a continuous expected trajectory requires a significant amount of manpower and resources . Especially in the face of the need for task control with variable flight paths , when there are changes in the expected flight path , it is necessary to re plan the flight path , which greatly limits the engineering application of automatic flight control . The continuous expected trajectory is only necessary for solving control algorithms . From the perspective of practical applications , controlling ships to navigate out of a certain shape of the expected trajectory only requires some key points of the expected trajectory.

Get a Quote / Info